BMP085 trykmåler
Koden måler tryk og temperatur
Trykket omsættes til højde over havet
kræver at der indsateste områdets øækvivalente lufttryk ved 0m
Terminal driver med 115200 baud
#include <Wire.h>
#include <bmp085.h>
/*
1. call bmp085_init
- parameter pressure at sealevel (in Pascal) or 0
if 0 then 101325 (std pressure at sea level) is used
2. Measurement by
a. call bmp085_measure()
b. now pressure and temperature is in float variables bmp085_temp and bmp085_pres
*/
void setup()
{
Serial.begin(115200);
Wire.begin();
bmp085Init(0x77,101300.0); // ress at sealevel today - contact local met office :-)
// i2c addr is 0x76 or 0x77 use i2cscannermpu6050 to check
}
float temp, atm, alt, pres;
#define LOOPTIME 200
unsigned long t1, t3;
void loop()
{
float tryk, temp, hojde;
bmp085Measure(&temp, &tryk, &hojde);
Serial.print("temp(C) "); Serial.print(temp);
Serial.print("\t tryk(Pa) "); Serial.print(tryk);
Serial.print("\t hojde(m)"); Serial.println(hojde);
delay(100);
}
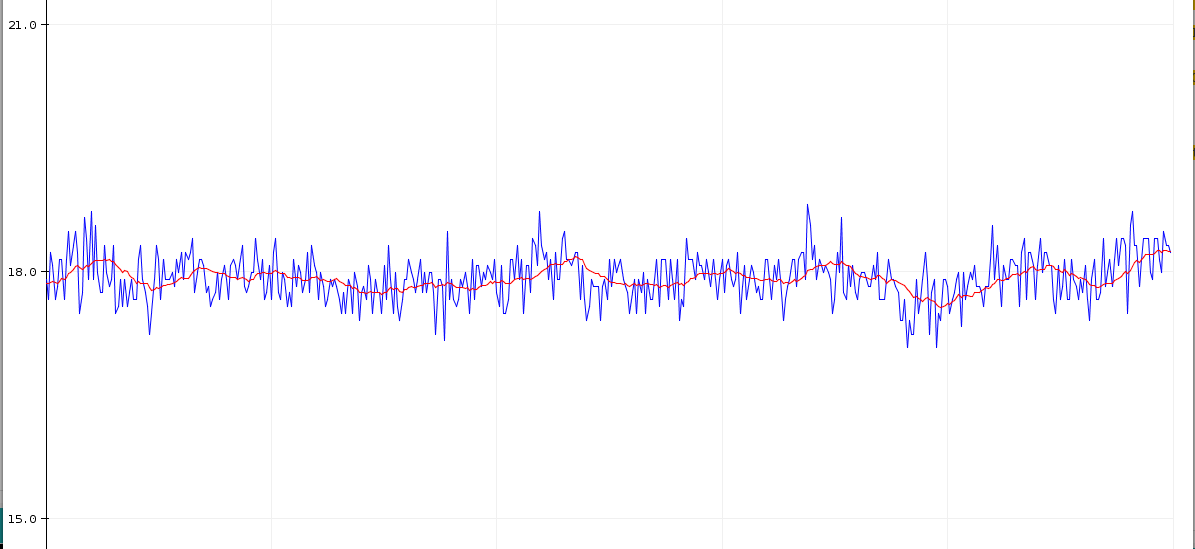
Dagens luftryk
Et plot af dagens luftryk vha serial bmp085staverage.ino
Der midles over 20 værdier og der samples hvert 5 msec.
Dvs
Den blå kurve er rå samples hvert 5 msekund
den røde kurve er en rullende middelværdi over 20 samples
plottets bredde er 500 samples dvs 2500 msec eller 2,5 sekund.
yaksen er højden i meter over havets overflade
De blå værdier ligger indenfor ca plus-minus 0.5m
Den røde rullende middelværdi noget mere præcis
 |
Koden
#include <Wire.h>
#include <bmp085.h>
// NB NB find atm pressure at sealevel for today and adjust SEALEVEL below
#define SEALEVEL 102320.0
// ---
#define LOOPTIME 5
#define AVERSIZE 20
float ff[AVERSIZE];
void initAverageArray()
{
static float pres, temp, alt;
for (int i = 0; i < AVERSIZE; i++) { // do AVERSIZE start measurements
bmp085Measure(&temp, &pres, &alt);
delay(LOOPTIME);
ff[i] = alt;
}
}
float calcAverage(float ff[])
{
float mean = 0.0;
for (int i = 0; i < AVERSIZE; i++)
mean += ff[i];
return (mean / AVERSIZE);
}
void setup()
{
Serial.begin(115200);
Wire.begin();
delay(10);
bmp085Init(0x77,SEALEVEL); // ress at sealevel today 0x76 or 0x77
delay(10);
initAverageArray();
}
void loop()
{
// placed here with static to guard by use of scoperules
static int index = 0;
static float pres, temp, alt;
static float averageAltitude;
bmp085Measure(&temp, &pres, &alt);
// overwrite oldest value
ff[index] = alt;
index++;
if (AVERSIZE <= index) // wrap around
index = 0;
averageAltitude = calcAverage(ff);
Serial.print(alt); Serial.print(" ");
Serial.println(averageAltitude);
delay(LOOPTIME);
}
/* ende */
Jens
THE BEER-WARE LICENSE (Revision v 42)
jensd@jensd.dk wrote this file.
As long as you retain this notice you can do whatever you want with this stuff on these pages.
If we meet some day, and you think this stuff is worth it, you can buy me a beer in return :-)
(C) Jens Dalsgaard Nielsen
credit for license this goes to phk@FreeBSD.ORG

As long as you retain this notice you can do whatever you want with this stuff on these pages.
If we meet some day, and you think this stuff is worth it, you can buy me a beer in return :-)
(C) Jens Dalsgaard Nielsen
credit for license this goes to phk@FreeBSD.ORG