Digital noise filtering by use of Expotential Moving Average (EMA)
Expotential Averaging is actually a standard 1-pins IIR filter.
Its quite easy to use because there is only one parameter - in this page named alpha - to adjust.
Starting with the algorithm
 |
Its also known as a low-pass single pole IIR filter or a first order IIR filter (similar to an analog RC filter)
Letting alpha …
increasing towards 1 leads to y[n] ~= x[n] so filtering effect do decrease
alpha = 1 - no filtering
alpha -> 0 - filter gets more aggresive
alpha = 0 - what does the formual tells you ?
If the factor (1-alfa) on the y[n-1] is greater than or equal to 1 the filter is unstable.
A document describing EMA in more detail: link - a local copy
In the SMA we should select how many old sample values had to be used in the filter. Increasing number of samples did give a slower step response.
In EMA we have to choose the weight factor - alpha. Larger alpha equals increasing cutoff frequency
Higher order digital filters - a comment
Higher order digital filters is rather complicated.
Another way to do it is by setting requirements to your freqyency response
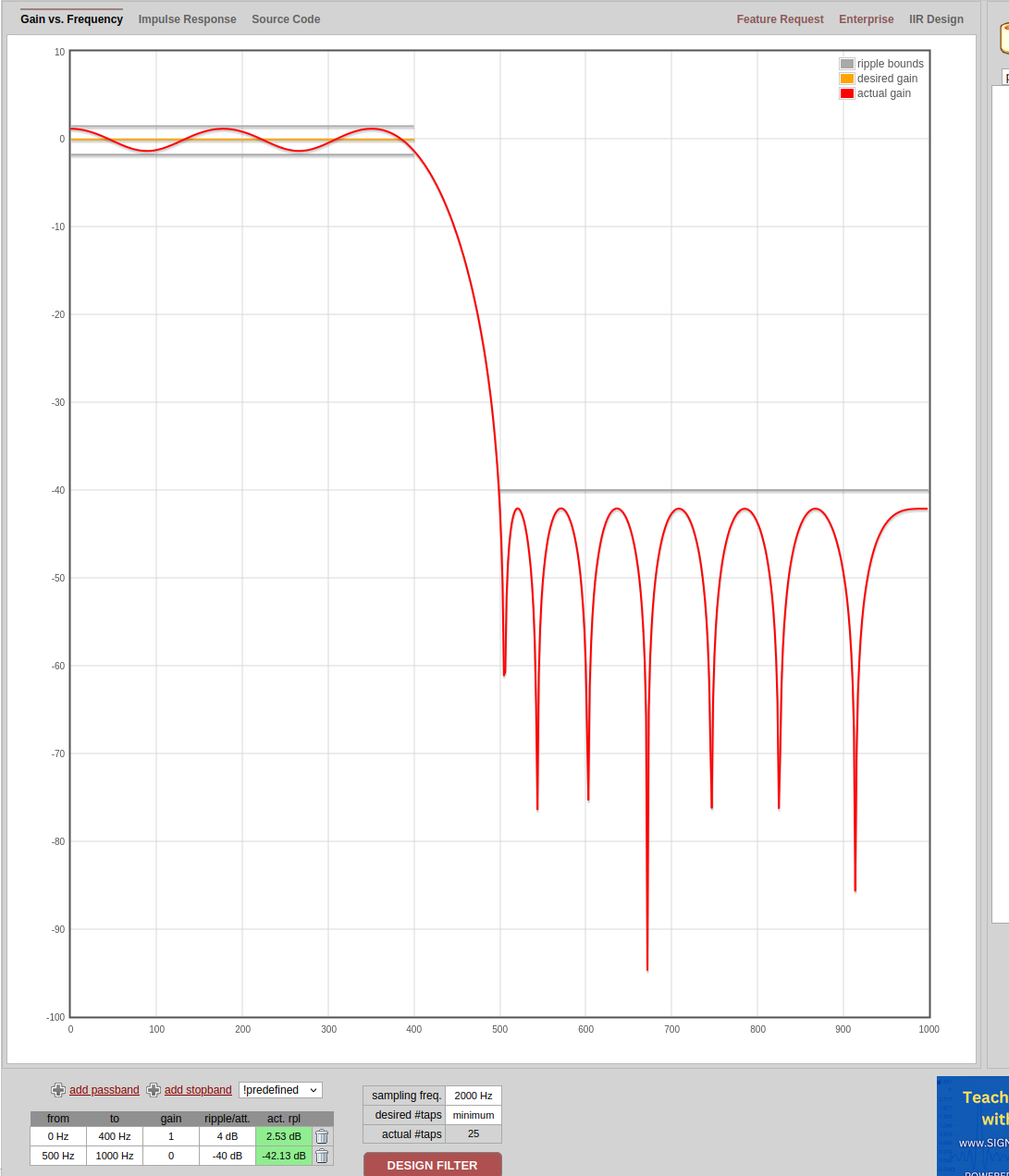
Here is a link to very pro homepage for designing digital filters: http://t-filter.engineerjs.com/
You can design rather complex filters but here we will stick to a low pass filter Here can shall
Select sampling frequency - Herz ( 2000 Hz)
Low pass part
Gain in pass band in apmlification (not in dB) select 1 = 0 dB
max deviation of gain in passband(ripple) in dB select 4 dB ( +-2 dB)
Frequency range - like 0 Hz to xxx Hz 0 to 400 Hz
High stop part
Gain in stop band - normally 0
Minimum damping rel to pass band in stop band -40 dB
increased damping will increase size of filter
Desired # taps in the filter
either let tool select it (selected)
or select by your self
(Manually seleted) fewer tabs might make your desired filter impossible
Result:
 |
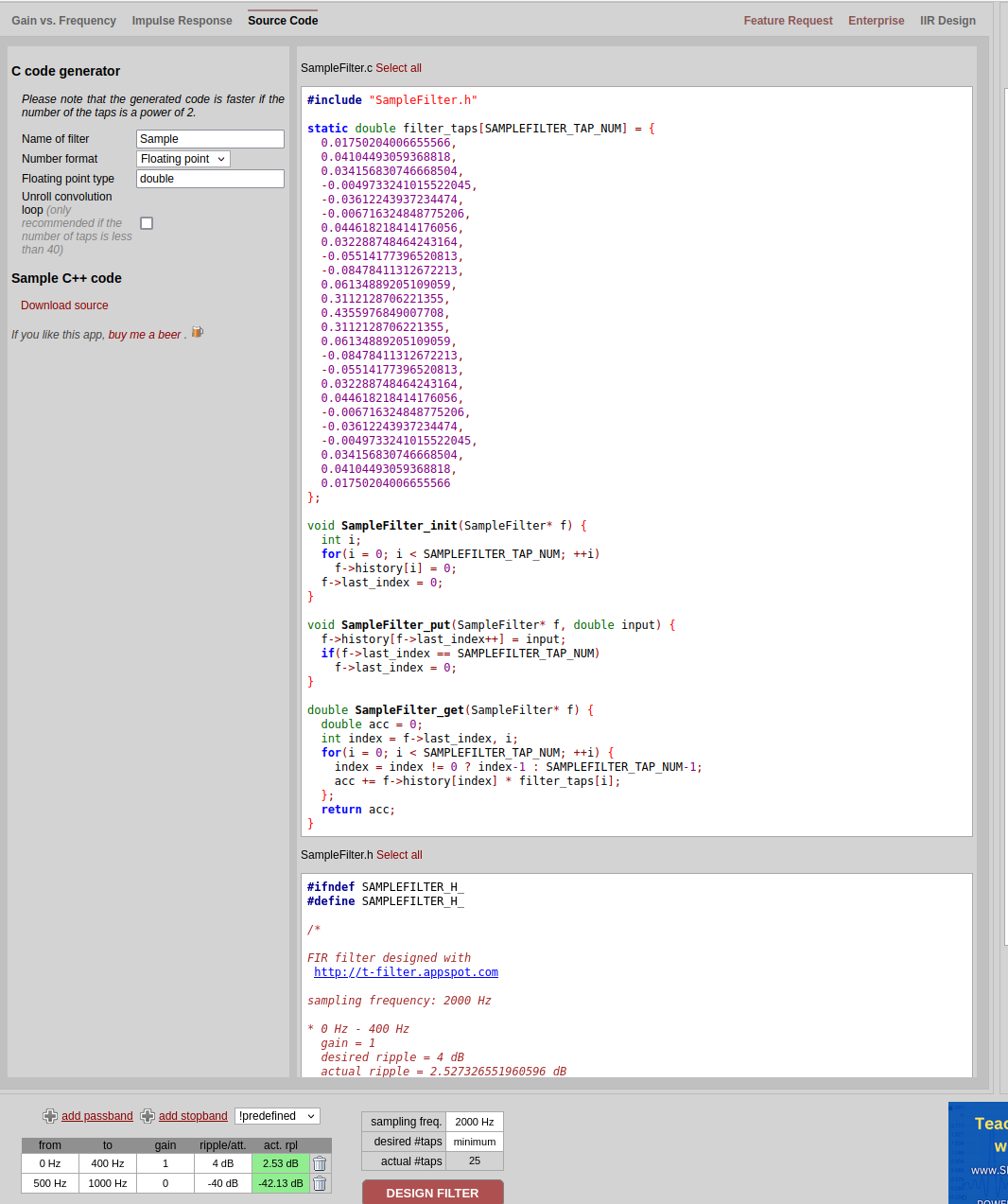 |
#ifndef SAMPLEFILTER_H_
#define SAMPLEFILTER_H_
/*
h file interface
FIR filter designed with
http://t-filter.appspot.com
sampling frequency: 2000 Hz
* 0 Hz - 400 Hz
gain = 1
desired ripple = 4 dB
actual ripple = 2.527326551960596 dB
* 500 Hz - 1000 Hz
gain = 0
desired attenuation = -40 dB
actual attenuation = -42.12980699449226 dB
*/
#define SAMPLEFILTER_TAP_NUM 25
typedef struct {
double history[SAMPLEFILTER_TAP_NUM];
unsigned int last_index;
} SampleFilter;
void SampleFilter_init(SampleFilter* f);
void SampleFilter_put(SampleFilter* f, double input);
double SampleFilter_get(SampleFilter* f);
#endif
//
#include "SampleFilter.h"
static double filter_taps[SAMPLEFILTER_TAP_NUM] = {
0.01750204006655566,
0.04104493059368818,
0.034156830746668504,
-0.0049733241015522045,
-0.03612243937234474,
-0.006716324848775206,
0.044618218414176056,
0.032288748464243164,
-0.05514177396520813,
-0.08478411312672213,
0.06134889205109059,
0.3112128706221355,
0.4355976849007708,
0.3112128706221355,
0.06134889205109059,
-0.08478411312672213,
-0.05514177396520813,
0.032288748464243164,
0.044618218414176056,
-0.006716324848775206,
-0.03612243937234474,
-0.0049733241015522045,
0.034156830746668504,
0.04104493059368818,
0.01750204006655566
};
void SampleFilter_init(SampleFilter* f) {
int i;
for(i = 0; i < SAMPLEFILTER_TAP_NUM; ++i)
f->history[i] = 0;
f->last_index = 0;
}
void SampleFilter_put(SampleFilter* f, double input) {
f->history[f->last_index++] = input;
if(f->last_index == SAMPLEFILTER_TAP_NUM)
f->last_index = 0;
}
double SampleFilter_get(SampleFilter* f) {
double acc = 0;
int index = f->last_index, i;
for(i = 0; i < SAMPLEFILTER_TAP_NUM; ++i) {
index = index != 0 ? index-1 : SAMPLEFILTER_TAP_NUM-1;
acc += f->history[index] * filter_taps[i];
};
return acc;
}
NOTE: the code is open for optimization and there are many float operations. But an impressive tool
Links - just garbage can
https://tomroelandts.com/articles/how-to-create-a-simple-low-pass-filter
https://fiiir.com/ filter design tool
For the interested people some links
https://motorbehaviour.wordpress.com/2011/06/11/moving-average-filters/
please note the technique to apply the same filter several times
As long as you retain this notice you can do whatever you want with this stuff on these pages.
If we meet some day, and you think this stuff is worth it, you can buy me a beer in return :-)
(C) Jens Dalsgaard Nielsen
credit for license this goes to phk@FreeBSD.ORG
